
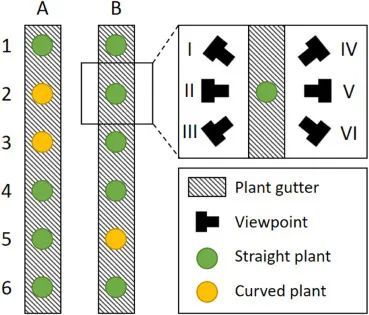
图2 实验装置示意图。植株生长在2个植物水槽( A、B)上,每个水槽含6株植物( 1 ~ 6株)。将弯曲植株A2、A3和B5分别称为离群植株4、5和8。六个视点(Ⅰ-Ⅵ)在图的右上角部分放大显示。
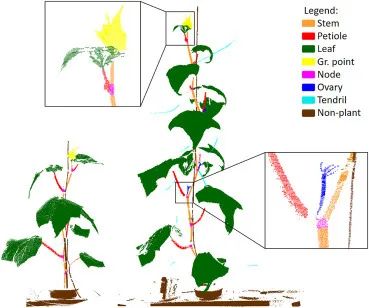
图5 数据获取的第一天(左)和最后一天(右)人工标注点云的实例。图中颜色代表图例中指定的类别,黑色方块表示点云的放大部分。
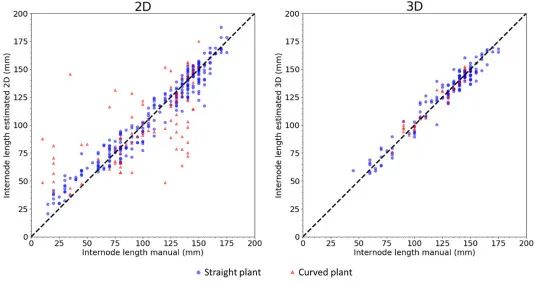
图9 人工测量的节点间长度(x轴)与估计的节点间长度(y轴)拟合图。左图为基于2D的结果,右图为基于3D点云的结果。直立植株的节点用蓝色圆圈表示,弯曲植株的节点用红色三角形表示。虚线表示函数x = y,表示估计的节点间长度等于人工测量值的位置。
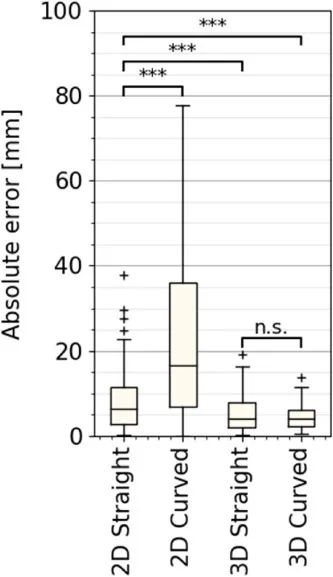
图10 基于2D和3D数据预测直立和弯曲植株节间长度的绝对误差( mm )。框表示下四分位数和上四分位数,须表示1.5倍四分位数间距内的最高和最低绝对误差。超出此范围的值被认为是异常值,并显示为“+”。显著性水平 “n.s. ”表示没有观察到显著性差异, “***”表示在p < 0.001的情况下观察到显著性差异。

2025/10/11
2025/10/11
2025/10/11
2025/10/11
2025/9/29
2025/9/22
2025/9/22
2025/9/22
2025/9/22
2025/9/19

Copyright © 2013-2022 武汉谷丰光电科技有限公司 鄂ICP备14020812号-1、鄂ICP备14020812号-2  鄂公网安备42018502003245号 网站地图
鄂公网安备42018502003245号 网站地图



